Ja da ist auch das Erscheinungsbild ein Anderes und man sucht sich nicht blöd...stelle es um...
Version 3.0.1. wird woanders als richtig genannt, Verbindung ist wieder da...
Im PDF von FunnyFlyer wird aber nicht über UART2 angeschlossen sondern über den Anschluss mit dem langen Stecker, wie im Video. Oder interpretiere ich das falsch? Ist alles so eingestellt, gebindet, Servo geht auch am Empfänger. Im Receiver Menü hab ich jetzt schonmal farbige Balken (vorher nur nichts) trotzdem noch keine Reaktion.
Noch jemand eine gute Idee?
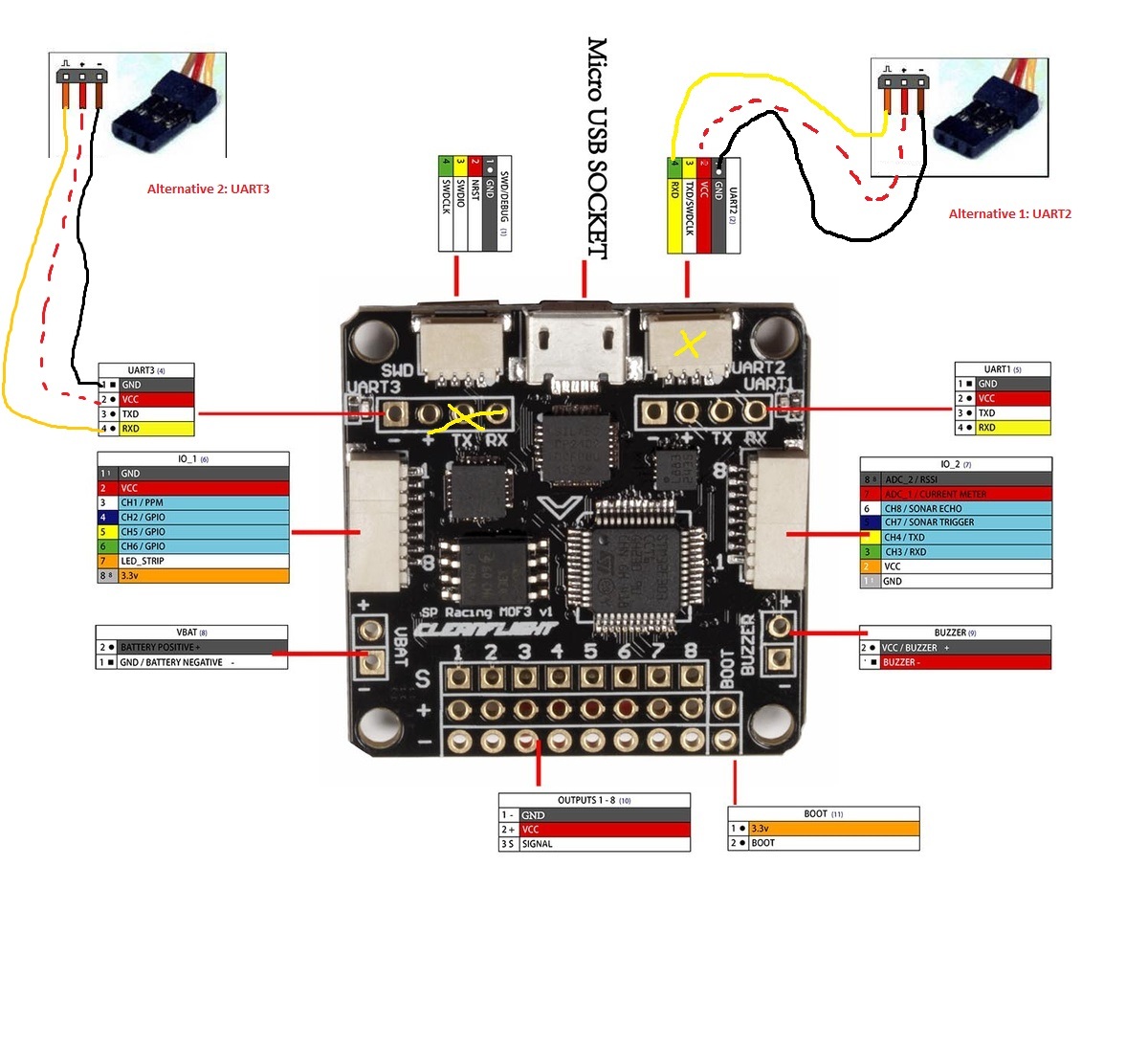
FunnyFlyer hat UART3 genutzt. Du hast da quasi freie Auswahl ob UART2 oder UART3. da kannst Du schauen, welche vom Kabelverlauf günstiger liegt.
das wird noch was werden  Am Ende ist dann die schwerste Übung das Kabel sauber zu löten
Am Ende ist dann die schwerste Übung das Kabel sauber zu löten 
Hi,
der Stecker mit dem weißen Kabel hat damit nix zu tun. Das ist der Stecker des IO1 bzw. IO2 Ports.
Du musst Du kleinen Stecker nehmen und korrekt an einen Servostecker löten, also das was ich in folgendem Satz schrieb:
"Ansonsten sieht die Belegung richtig auf Deinem Foto aus. GND auf PIN 1 und Data (gelb) auf PIN 4. Am anderen Ende des Kabels brauchst Du dann den Servostecker für den Flexempfänger (Buchse B/D)."
Also schwarz an schwarz, rot and rot (oder ggf. weglassen), gelb an gelb, und grün ist ja TX auf dem UART und kann bei SRXL frei bleiben, da SRXL nur in eine Richtung sendet.
Gruß Andreas
Hi,
so ungefähr ... ich würde UART2 nehmen, da kannst Du vermutlich direkt mit dem vorhanden Stecker arbeiten.
UART3 wären dann wohl die Lötpunkte hinten auf dem Board (gelbes X hingemalt).
Rot, VCC, Plus hab ich mal gestrichelt gemahlt, da manche der Meinung waren, daß + über das DATA Kabel mitgeliefert wird. Das musst Du mal ausprobieren. Denke man kann rot ruhig mitverdrahteten. Der Empfänger kann dann Strom über das Board bekommen.
Gruß Andreas
Habs so angeschlossen und in Betaflight auf UART2 und Serial Rx angeklickt. Das springt nach "save and Reboot" wieder auf Ausgangsstellung zurück. Im PDF von FunnyFlyer ist auch nur der Schieber bei UART1 und SerialRx in der unteren Zeile aktiviert. gibt bei mir aber in keiner Version eine Reaktion...
Hab jetzt auch UART3 mal angelötet aber auch da keine Reaktion. jetzt sind mal wieder die bunten Balken im Receiver Menü verschwunden...
Muss man im Sender noch etwas bestimmtes aktivieren? Der Test mit dem Servo klappt immer, dann müsste eigentlich doch auch was am SPF3 ankommen oder?
Hi,
also weiter suchen
- du musst mindestens Betaflight 3.1.0 oder höher auf die FC geflasht haben. Davor war nur SRXL V1 implementiert.
- UART1 auf Data = enabled nicht weiter anfassen.
- bei UART2 musst Du nur Serial RX enabled.
- unter Configuration nach der Doku von Betaflight vorgehen https://github.com/betaflight/betaflight/blob/master/docs/Rx.md33
- daher im Menü Configuration im Tab "Receiver" den Wert "Serial-based Receiver" einstellen
- und den "serial receiver provider" auf "XBUS_MODE_B"
Danach sollte man eigentlich im Menü "Receiver" schon Auschläge sehen, wenn Du an der Fernsteuerung was bewegst. Im Monitor der Fernsteuerung prüfen, das auch wirklich was gesendet wird. ggf. die Kanalzuordnung noch dort vor Ort im Menü vornehmen.
Gruß Andreas
Ok, werde ich alles nochmal testen. Vielen Dank!!
Vorerst nur noch eine Frage bevor ich erst am WE weitermachen kann...
Kann man nicht einfach die neueste Version (3.2.5) nehmen oder muss es eine ganz bestimmte sein?
hi, mit Firmware Version 3.0.1, die Du weiter oben erwähnst hast, wird es nicht gehen.
Ab 3.1 ist das Feature SRXL 16-Kanal enthalten.
In deinem Fall würde ich die neueste stable version nehmen und das ist die 3.2.5. Die sollte der Betaflight Configurator auch automatisch vorschlagen.
Ich selber nutze auch gerne die neuesten Release Candidates oder nightly builds. Aber falls Du Beginner bist oder ein Profi der keine Lust hast Bugs in der Firmware rauszuflöhen, dann Rate ich davon ab.
Gruß Andreas
JAAAAAA! Die Verbindung steht! Vielen Herzlichen Dank nochmal für die guten Tips und die Geduld mit den Anfängern!
Komischerweise laufen jetzt Motor 2 und 3 falsch herum. Kann man das in Betaflight ändern oder muss man die Kabel umlöten?
hi, man tauscht 2 beliebige von den 3 Adern eines Brushless-Motors aus. also wenn Du da Gewicht für Stecker gespart hast und gelötet... dann die entsprechenden Motoren umlöten.
dann fang mal mit nem "dump all" in cli an um alle Parameter initial wegzuspeichern und dann geht das Finetuning los.
Du hast nun schlussendlich uart2 genutzt?
fliegst Du FPV oder erstmal auf Sicht?
In Summe haben wir nun genau das gemacht, was Typhoon-Speeder in der ersten Antwort geschrieben hat.
Kabel mit UArt2 verbunden und die 3 Parameter gesetzt.
(ok und die neuste Firmware aufgespielt).
viel Spaß
Hallo,
hab noch kein FPV-System, muss erstmal so fliegen lernen. Aber ja, habe UART2 benutzt, die Kabel anders angelötet, die ESC´s mit BLHeliSuite neu geflasht (da hätte ich die Drehrichtung auch einfach ändern können), Motorstop programmiert, eigentliche alles was der in dem Video macht. Hat auch alles genau so geklappt und die Ausschläge bei der Fernsteuerung sind alle korrekt. die Motoren drehen alle richtig rum (in Betaflight alles getestet). Aber wenn ich die Drone von Betaflight abstöpsle, den Akku verbinde und versuche die Motoren zu starten, passiert nichts... Was könnte ich noch übersehen haben? (lässt einen nicht los das Ding!)
Hallo, wie "armst" du denn den Copter? Über die Knüppel oder hast du einen Schalter definiert?
Gruß Martin
Ok, da ist die nächste Einstellung die ich noch nicht kenne. Wie macht man das "arming"?
Lese mich gerade durch eine Anleitung... Aber das war der richtige Tip! Danke!!!
Hat geklappt! Habs mit Aux3 eingestellt. Props hab ich noch nicht drauf - ein Glück!
Andreas hat geschrieben: fang mal mit nem "dump all" in cli an um alle Parameter initial wegzuspeichern". Kannst du mir das genauer erklären?
Hi,
der Betaflight Configurator ist nur eine Oberfläche, damit man die verschiedenen Parameter von Betaflight nicht über eine Shell/Kommandozeile eingeben muss.
Wenn Du die Kommandozeile/CLI in Betaflight öffnest und dort "dump", "diff" oder "diff all" eingibst, kannst Du alle Parameter und Ihren Wert einsehen und komfortabel in ein Textfile speichern. mit diff siehst Du nur die Parameter die von der Werkseinstellung abweichen.
Falls Du beim Erfliegen der PID Werte und das Finetuning (z.B. wie soll sich die Drohne bei Crasherkennung oder Failsafe verhalten) Ämderungen vornimmst kannst Du darüber später sehr einfach alte Zustände wiederherstellen oder neue Zustände gefahrlos testen, ohne die vorherigen Einstellungen zu verlieren.
Daher würde ich nun einmal alles wegsichern. Und dann nach jedem weiteren Tuning auch wieder ein Backup aller Parameter machen.
Gruß Andreas
